Drone Mapping
- tags: Drones
- Resources
- Open Drone Maps
- Relative accuracy is about 2-3 times the ground sampling distance.
- Absolute accuracy depends on the GPS used in the system.
- Factors affecting accuracy
- Weather, sun condition, cloud cover, wind speed.
- Camera resolution and shutter type (mechanical)
- Flight altitude, larger GSD.
- Flight speed, in relation to camera shutters RTK also affected by speed. Limiting factors is the speed at which you are moving multiplied by 1 sec increments of RTK.
- Calibrate the Camera
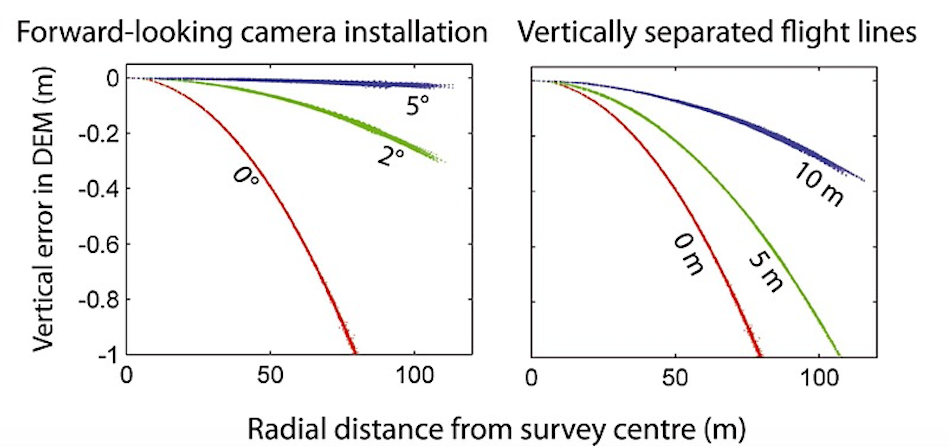
- Errors can propogate over large datasets, creating a bowing effect on end results.
- To mitigate this effect, there are a few options but the simplest are as follows: fly two patterns separated by 20°, and rather than having a nadir (straight down pointing) camera, use one that tilts forward by 5°.
- Alternatively, the following experimental method can be applied: fly with much lower overlap, but two crossgrid flights (sometimes called crosshatch) separated by 20° with a 5° forward facing camera.
- Crossgrid overlap percentages can be lower than parallel flights. To get good 3D results, you will require 68% overlap and sidelap for an equivalent 83% overlap and sidelap.
- To get good 2D and 2.5D (digital elevation model) results, you will require 42% overlap and sidelap for an equivalent 70% overlap and sidelap.
-
-
Choosing Right Camera
- To put this another way, the focal length, sensor size (size of the chip that detects light), and density of detectors on that chip all influence the altitude required to collect data of a given spatial resolution (i.e., minimum resolvable object size).
- Large detector size. A larger detector size means that the imagery collected will be of higher quality or fidelity. This is in part because larger detectors are typically found in larger, higher-quality cameras, but also because larger detectors can collect more energy from a given pixel and therefore typically have a much higher signal-to-noise ratio.
- Uncompressed image formats. Many cameras record only compressed formats (JPG), which reduces the radiometric quality of the imagery. Sensors that are capable of recording in RAW, TIFF, or other uncompressed formats produce higher-quality images.
- Trigger control. Ideally, the camera shutter is triggered by an external system that records the location and time of each shot. This is typically the flight control system (autopilot) or a separate GPS sensor. Many professional-grade cameras have software that enables remote control, but consumer cameras often lack remote trigger ability unless custom modifications are made. For these consumer cameras, the shutter must be triggered continuously by time interval (though not all cameras have even this capability). If triggering by time interval is the only option, the sensor must have a buffer sufficient to enable continuous acquisition at the rate required to collect the forward overlap selected.
- High-quality prime lenses. When possible, high-quality prime lenses (i.e., lenses of fixed focal length) should be used. Many smaller sensors do not allow for the use of prime lenses. Where they are absent, the camera should be operated only at the extremes (minimum or maximum of the focal range) for digitally controlled “zoom”; or in the case of variable focal length lenses controlled manually, tape can be physically applied to the focus wheel to ensure that the focal length remains consistent throughout and between flights, which is critical for processing. **Wide-angle lenses (~ )DronesDrone Mapping
-
tags: Drones #Drone Mapping
- tags: Drones #Drone Mapping #Lora Telemetry Flight Controller
Notes mentioning this note
Drone Mapping
tags: Drones Resources Cameras Arducam Arducam for Pi 12mp imx477 Pi cam Pi cam V2 8Mp Sony UMCR10C 20Mp Drones...
Drones
tags: #Drone Design Resources Ducted shape for better efficiency Capolight RC Turbine model reviews Youtube FPV parts list Airplane UAV...