Compliant mechanism
- tags: Machines CNC MTM Flexure
- Resources
- Flexible Research group UCLA
- Axiomatic design theory for systems Nam suh
- Quality through axiomatic design Nam suh
- Compliant Mechanism by Larry Howell
- Thesis on Flextures Shorya Awtar learning
- Handbook of compliant mechanisms learning
- BAX EDM Home made edm, Flextures Flexure
- Amy Flexture demo board
- Flxsys Compliant mechanismsFlexure
- Compliant mechanism design Facts of Mech
- Monolithic Binary stiffness building blocks of mechanical digital machines
- Lamina Emergent stages BYU
- Compliant precision lathe
- Notes
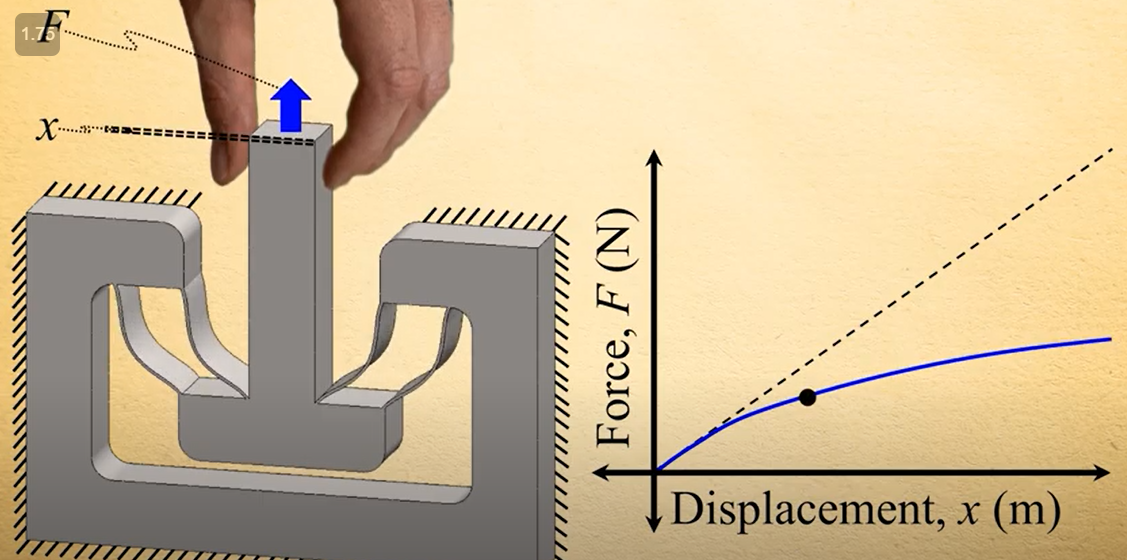
- Spring Stiffness
- Stiffness can be said as the derivate of the force with respect to the deflection. In a linear spring, this deflection will be a straight line.
- Ways to affect the stiffness,
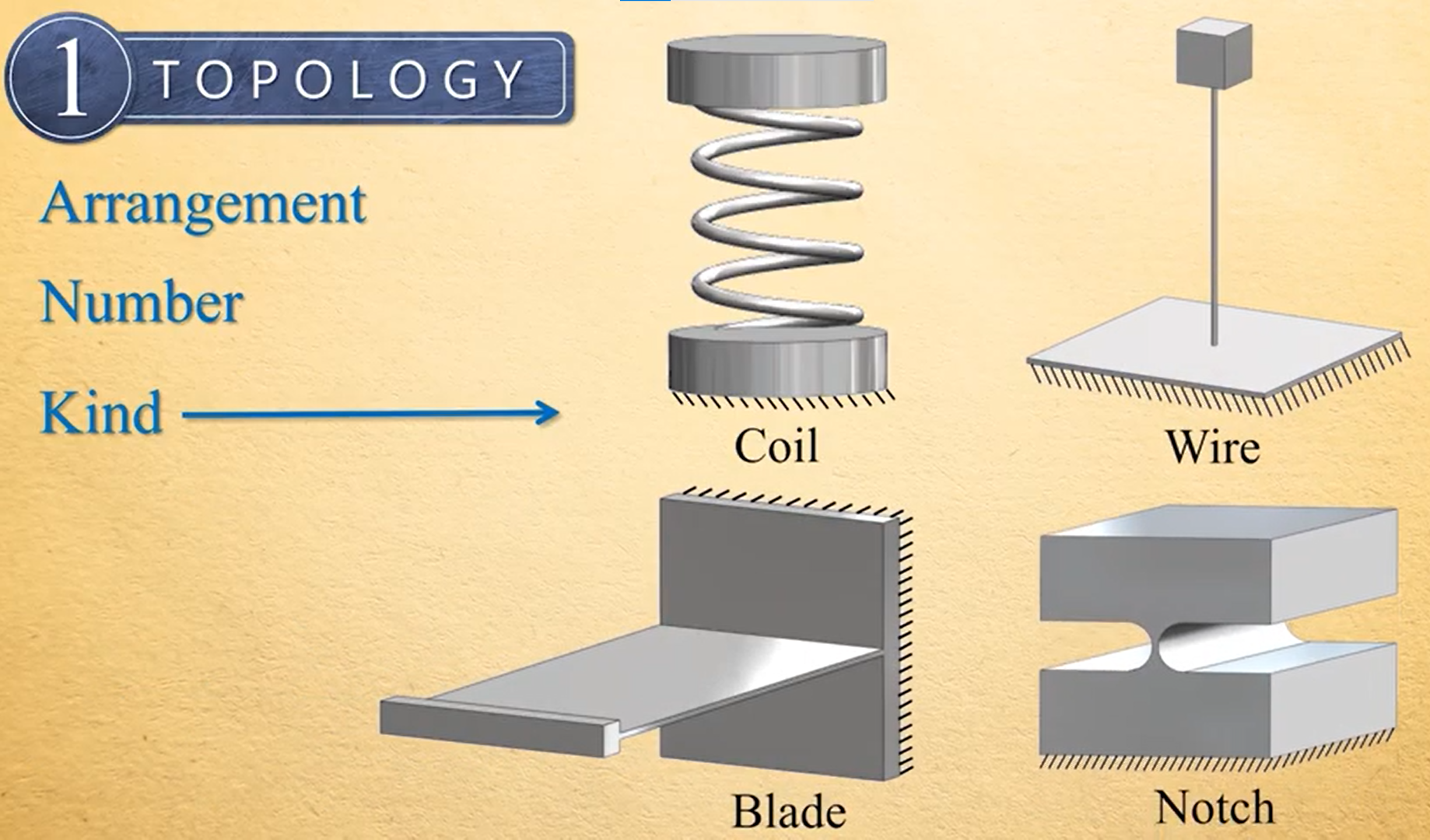
- Topology
- Geometry, making the blades thinner, longer and wider.
- Material, Making the spring out of more compliant materials.
- Topology
- Non linear springs
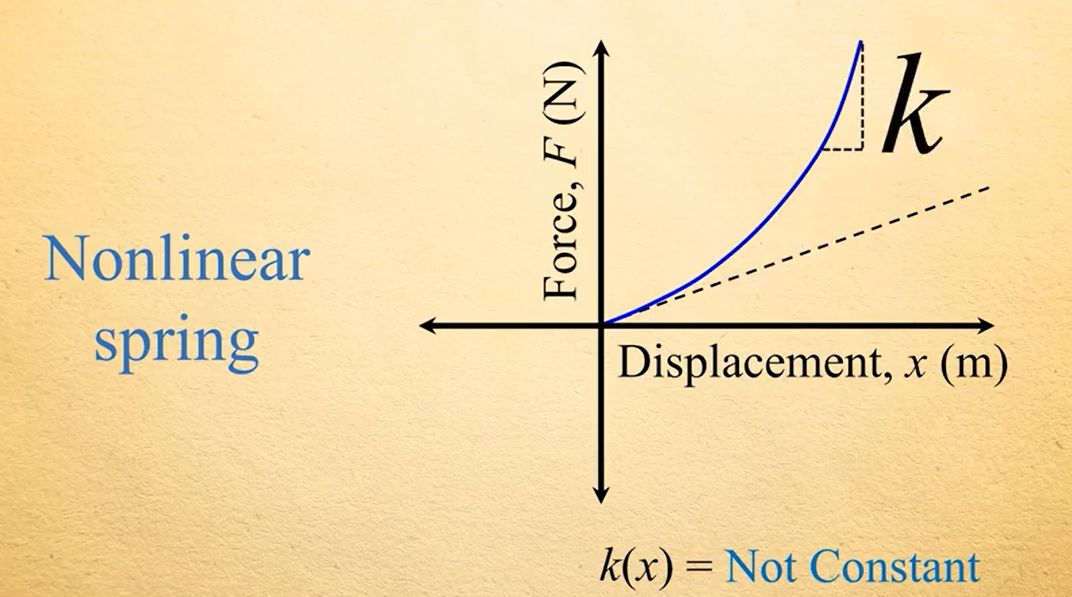
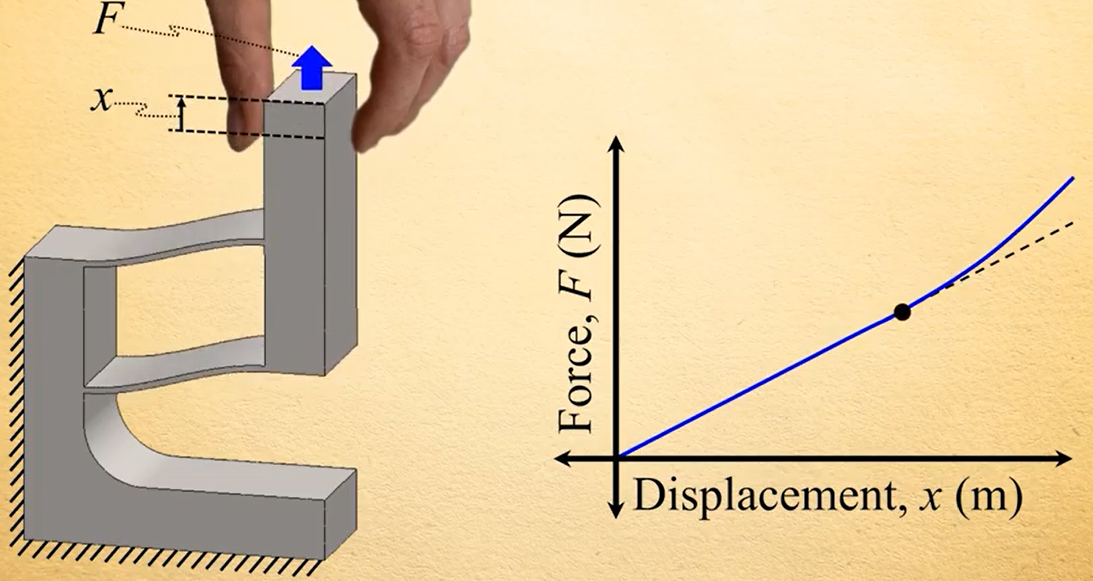
- Even though they can be considered linear, after certain deflection, the stiffness begins to increase appreciably.
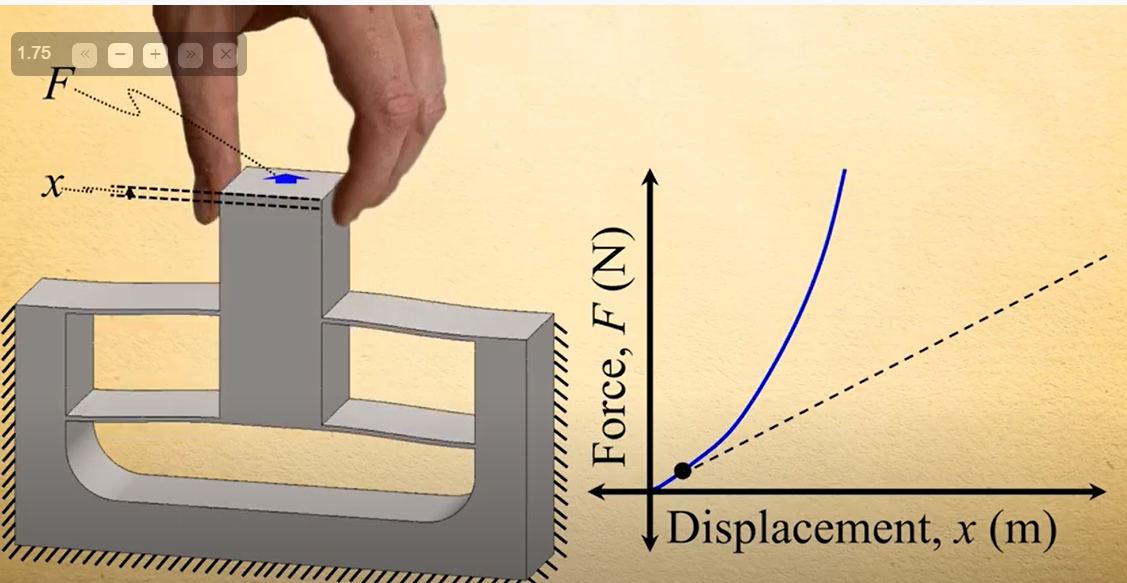
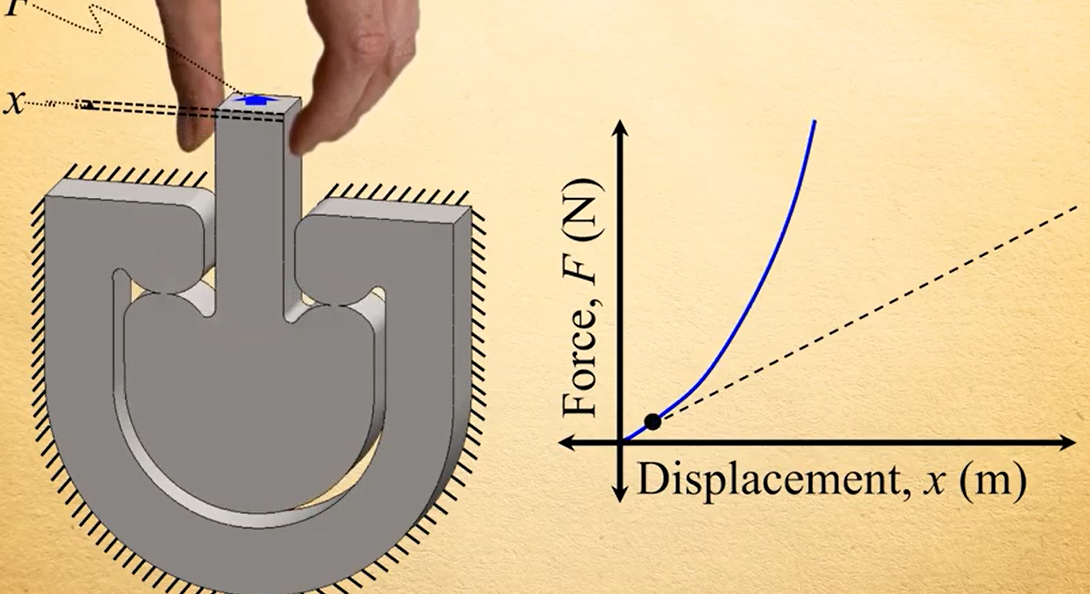
- The stiffness changes almost immediately as the beams have to stretch and bend as they deform.
- Some springs can be designed to reduce the stiffness as they buckle.
- Most metals exhibit a linear stress strain relationship, but some elastomers have non linear elastic properties that change as the material is deformed. If we combine the stiffness properties of a design with a complementary material we can alter the design to have optimal stiffness along the range of motion.
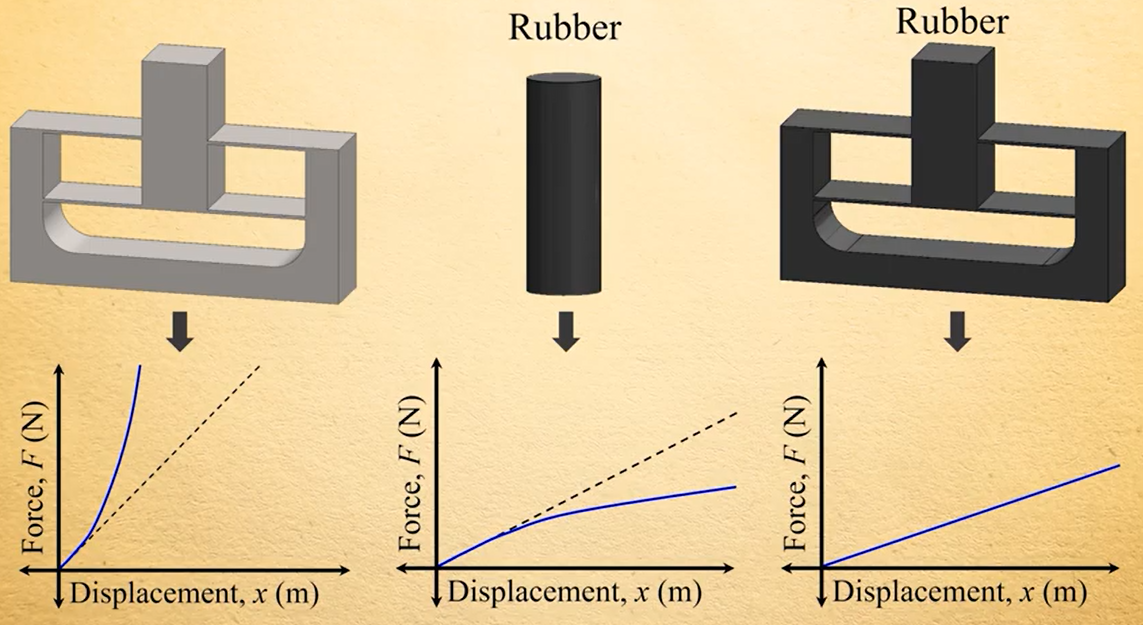
- The nonlinear elastic properties of the spring are canceled by the nonlinear properties of the material.
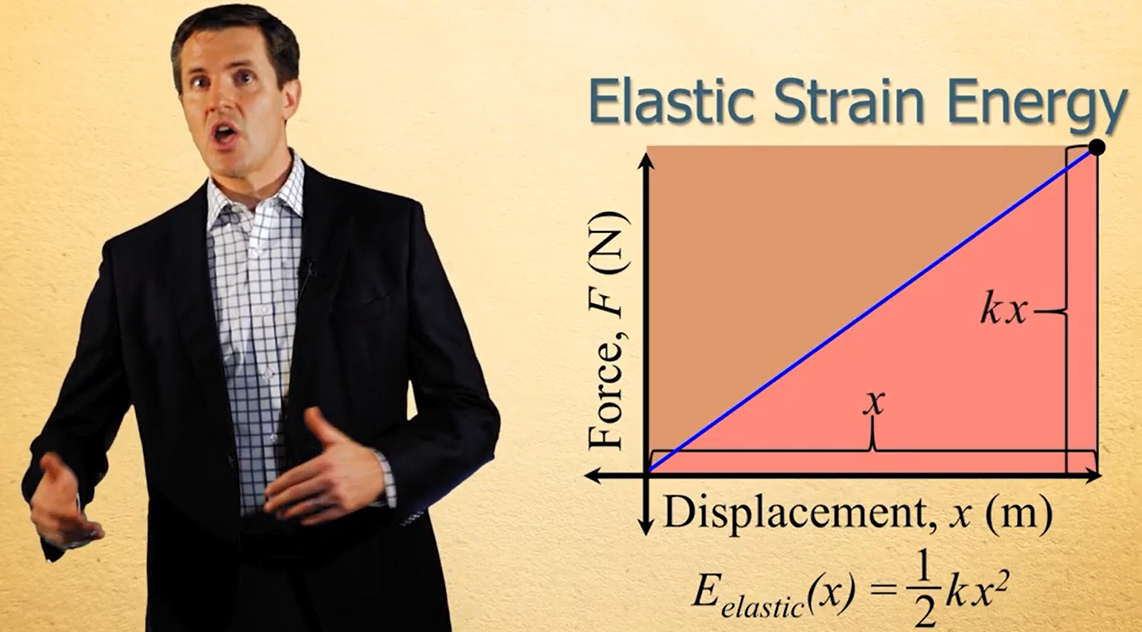
- Elastic strain Energy
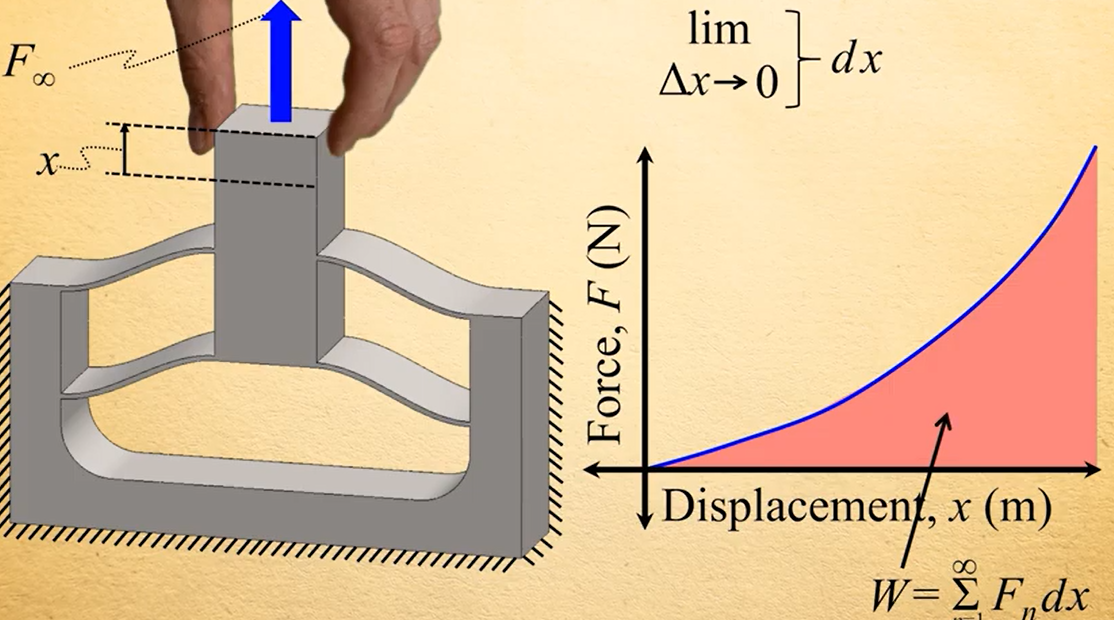
- Under elastic conditions and given the material is not permanently damaged, all the work under the force displacement graph is said to be stored in spring as Elastic strain energy.
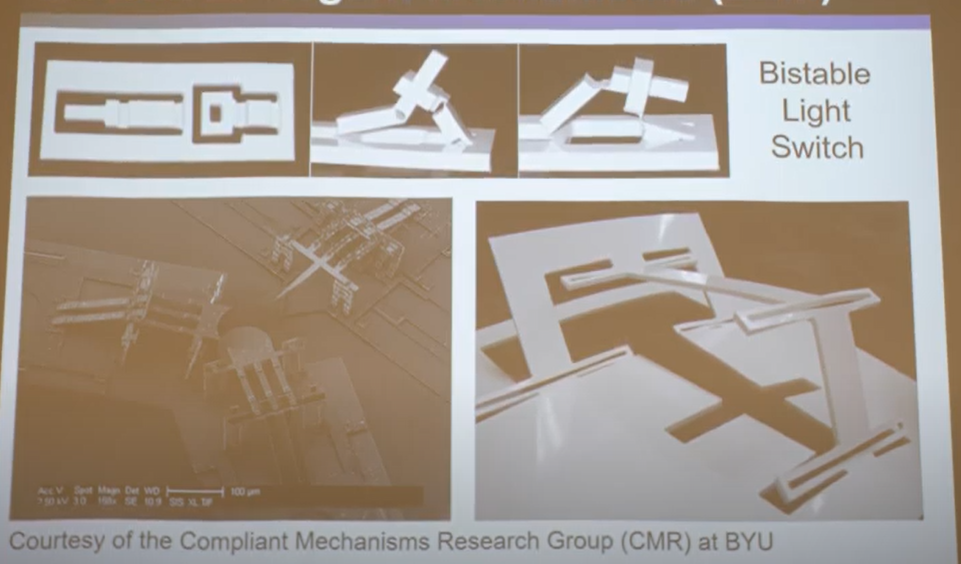
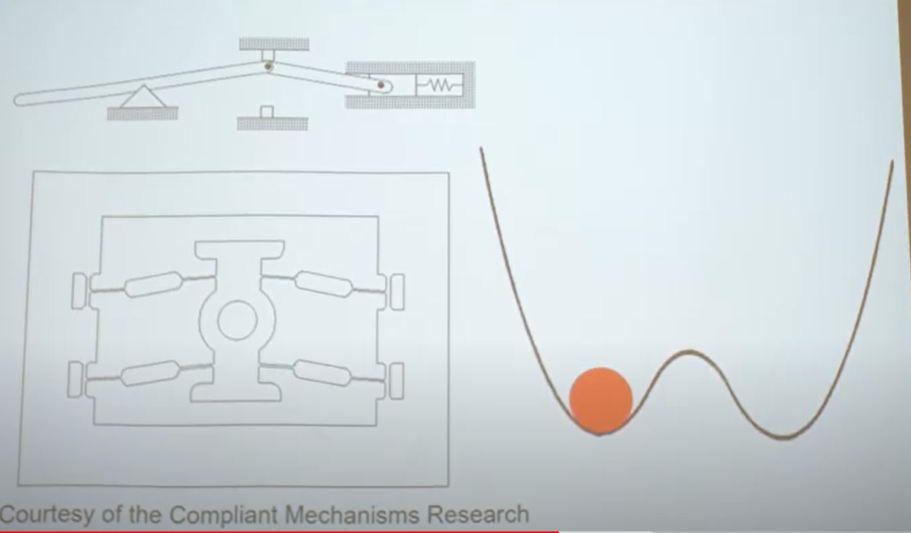
- Bi Stable switch
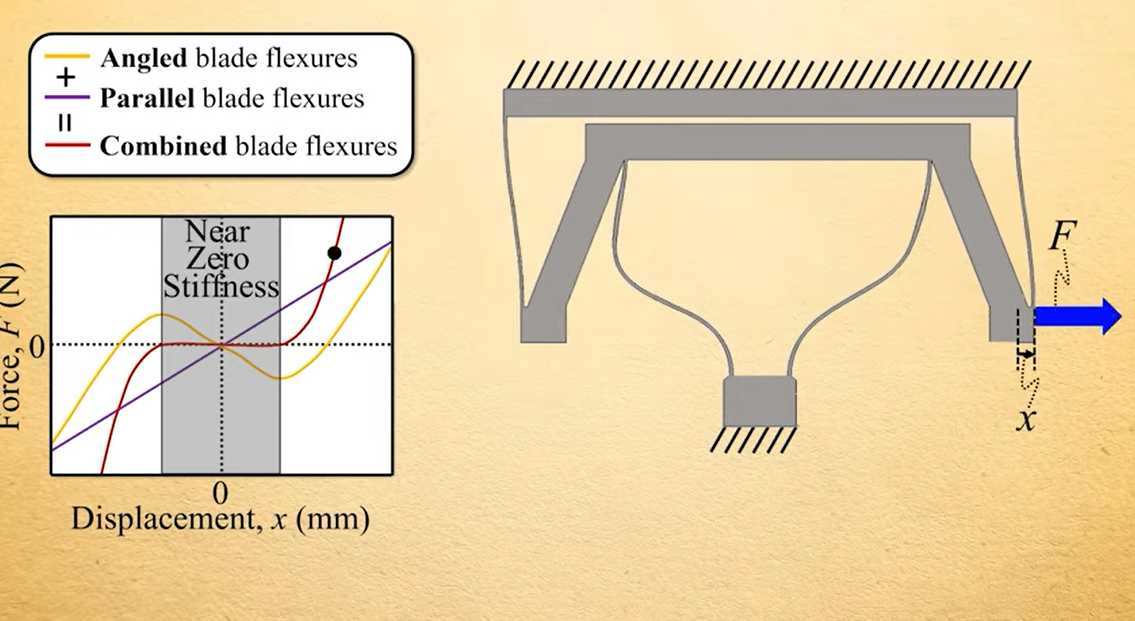
- The stiffness of the two elements can be added together because they are parallel, ie they experience the same displacement of the shuttle.
- Axiomatic design
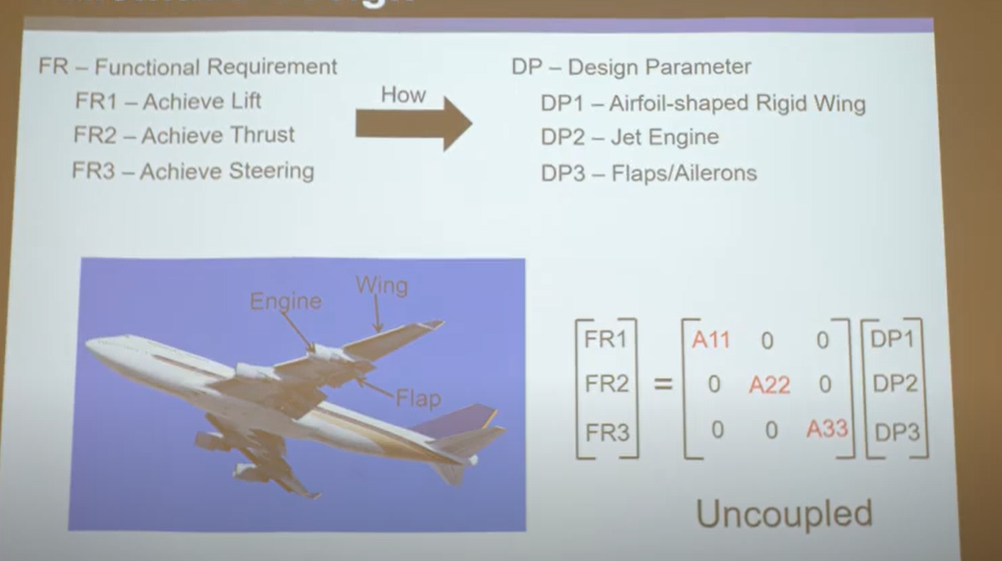
- Functional parameter only affect one area of the design parameter and the requirements are uncoupled from the design parameters.

- Compliant systems are inherently nonlinear and optimizing for all the variables is difficult and time-consuming. In nature, all systems are coupled and influence one another.
- For eg, if we wanted a circular motion about an axis, its easier to use rigid bodies and put a pin joint there, if we were to make it compliant then it becomes a non linear problem where the center of rotation will depend on the force, location and the material.

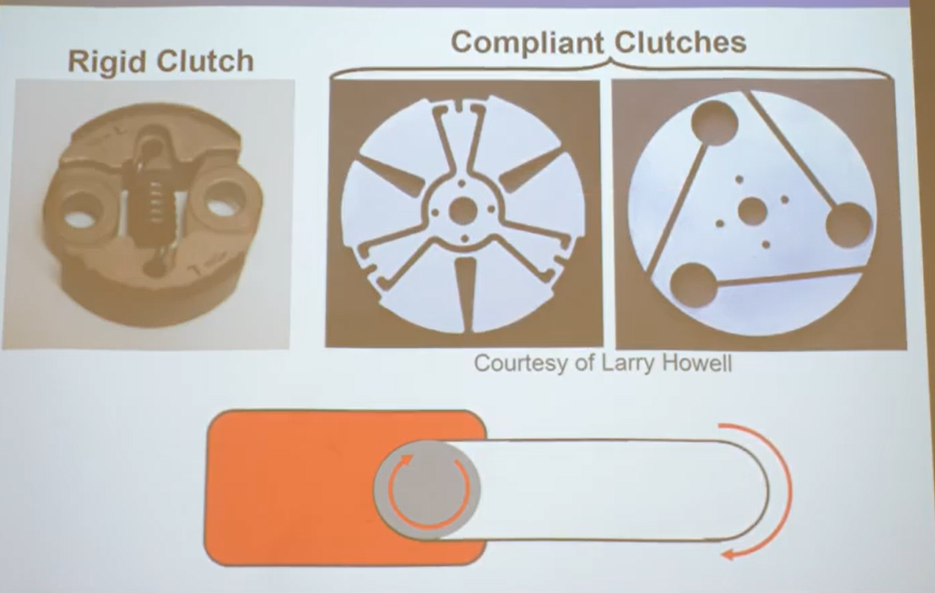
- Compliant clutches.
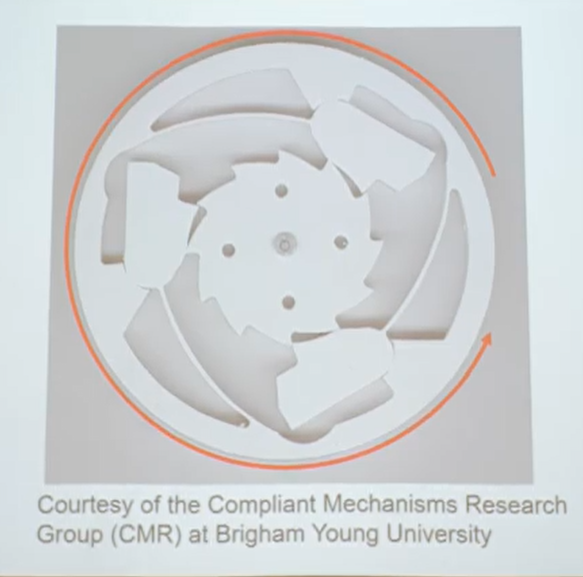
- 360 Robot joint

- These are rigidly constrained in all directions but offer zero stiffness in rotation. Used for robot joints. These can be taken a step further with engineered materials.

- Over running clutch
- Bi Stable Switch
- Lamina Emergent Systems
- Making things in 2D that can assemble on fold into 3D shapes.
-
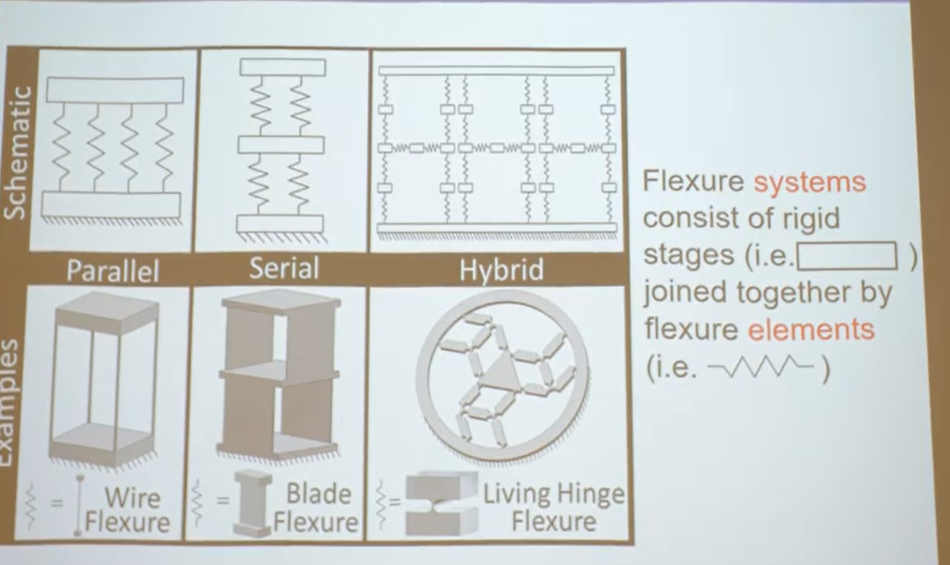
Flexure
- A flexure is a mechanism consisting of a series of rigid bodies connected together by compliant elements that is design to produce a geometrically defined motion upon application of force. - Stuart Smith

- Spring Stiffness
-
tags: #Mechanical #Compliant mechanism #Machine Design
- Compliant mechanism
Notes mentioning this note
Compliant mechanism
tags: Machines CNC MTM Flexure Resources Flexible Research group UCLA Axiomatic design theory for systems Nam suh Quality through axiomatic...
Flexure
tags: Materials Mechanisms #Flex pivots Resources Flexure notes Mat mit MIT Characteristics of Beam based flexures Spherical Flextures Spherical flextures...
Machine Design
tags: Robotics #Mechanical Machines Fabable Machines Linkages Resources Theory Basic Machines US Navy guide to basic machines like levers, gears....